AEROVITA - concept for eco-friendly electric hovercraft vehicle with road approval | post-ideas.com
AEROVITA - concept for eco-friendly electric hovercraft vehicle with road approval
Here’s a concept design for an electric hovercraft that:
* Seats 4 to 6 passengers
* Is legal for road traffic
* Does not resemble a car
* Features an innovative, independent vehicle design
---
Vehicle Name: "AEROVITA"
---
Core Design Elements
1. Form Factor & Shape
* Main Structure: Elliptical pod shape (similar to a flattened blimp) with a teardrop tail. Smooth, seamless surfaces.
* Height: Lower than an SUV but taller than a sedan, allowing both road visibility and low-profile lift.
* Orientation: Symmetrical front and back (bi-directional), removing the need for "reverse" and enhancing aerodynamic aesthetics.
2. Lift & Propulsion
* Lift:
* Dual ducted fan arrays under the body with magnetic dampening skirts (not inflatable skirts like marine hovercraft).
* Controlled air pressure allows road-hovering (5–10 cm) with dynamic stability for potholes and minor elevation changes.
* Propulsion:
* Lateral vector thrust pods located at each corner — these allow silent forward, backward, and lateral movement.
* Electrically driven turbine fans with adjustable pitch blades for thrust and braking.
3. Road-Legal Dynamics
* Ground Effect Sensors to maintain safe hover height and stability.
* Digital Lighting Strips around the body: Adaptive headlights, brake lights, and turn indicators seamlessly integrated.
* Retractable Skid Pods (like legs of a lunar lander) allow static parking/stopping on traditional roads.
* AI Road Compliance System: Ensures dynamic lane-keeping, speed adaptation, and hazard recognition.
---
Interior & Seating
* Seating Layout:
* 2+2+2 or 3+3 lounge configuration with rotating bucket seats for social/interpersonal interaction.
* No steering wheel — piloted via joystick, voice commands, or autopilot.
* Windows & Visibility:
* 360° curved panoramic electrochromic canopy.
* Roof is semi-transparent and solar-coated.
* Materials: High-strength carbon-fiber exoshell with graphene battery array embedded under floor.
---
Power System
* Battery Type: Solid-state modular lithium-graphene cells (600–800 km range).
* Charging: Wireless inductive + solar panel augmentation on upper surfaces.
* Emergency Reserve: Capacitor burst cells for rapid power in obstacle-avoidance or lift failures.
---
Tech & Features
* Fully Autonomous Navigation (L5) with manual override.
* LiDAR + Visual Sensor Dome on top, akin to a halo.
* Modular HUD projected on inner canopy.
* Environmental Adaptation Mode: Adjust hover height for rough terrain or urban streets.
---
Stylistic Highlights
* Inspiration: A mix of retro-futurism, nature (manta ray form), and science-fiction transport pods.
* Exterior Finish: Smooth ceramic-metallic skin with customizable lighting and digital surface patterns.
* Wheels: None visible — levitation only. Skid legs remain hidden until needed.
---
Optional Variants
* "Urban Ghost": Matte black stealth edition with noise-canceling field.
* "Aurora Halo": Iridescent skin that changes color dynamically based on speed and sunlight.
* "SkyRunner": Off-road capable version with slightly higher lift range and terrain mapping.
---
AEROVITA Hovercraft – Technical Specifications
1. Chassis & Body
* Body Shape: Monocoque teardrop fuselage with aerodynamic bottom curvature
* Length: 4.5 m
* Width: 2.3 m
* Height: 1.6 m
* Weight (Unladen): Approx. 1,800 kg
* Material Composition:
* Outer shell: Carbon-fiber composite with nano-ceramic coating
* Inner structure: Titanium-reinforced graphene honeycomb framework
---
2. Lift System (Hover Mechanism)
* Hover Height: Adjustable from 5 cm to 25 cm (road mode: 7–10 cm)
* Technology:
* 4x ducted electric lift fans (dual-layer, counter-rotating)
* Electromagnetic stabilization skirt ring
* Power Source: Direct-fed from propulsion battery; supercapacitor boost module
* Stability System:
* 360° IMU array
* Terrain-adaptive feedback via underbody LiDAR
* AI-assisted dampening control to counteract pitch and roll
---
3. Powertrain
* Battery Pack:
* 180 kWh solid-state lithium-graphene pack
* Range: 600–800 km (road hover)
* Charging Options:
* 350 kW fast charge port (20–80% in 18 minutes)
* Wireless inductive charging pad compatible
* Solar micro-tile surface integration (roof + upper rear)
* Cooling: Liquid cooling with phase-change radiator backing plate
---
4. Propulsion & Maneuvering
* Main Propulsion:
* 4x vector-thrust pods (one per corner)
* Electrically driven variable-pitch fanjets with silent blade geometry
* Combined thrust: 220 kW
* Max Speed:
* Urban limit: 120 km/h
* Off-road/hoverfield mode: 60 km/h
* Maneuvering:
* Omni-directional movement
* Lateral drift and rotation capabilities via asymmetric thrust
---
5. Navigation & Control
* Autonomy: SAE Level 5 (full self-driving)
* Control Methods:
* Joystick + touchscreen interface
* Voice + gesture input
* Manual override using holographic HUD controls
* Sensors:
* LiDAR dome (360°)
* Front and rear optical arrays
* 8-point ultrasonic proximity sensors
* Redundant inertial nav + GPS fusion
---
6. Interior
* Passenger Capacity: 4–6 (2x3 or 3x3 modular layout)
* Seats: Rotating zero-gravity style with memory gel contouring
* Cabin Features:
* Ambient lighting with reactive mood modes
* Augmented reality canopy HUD
* Smart glass (electrochromic)
* Air-filtration & climate with adaptive zoning
* Sound: Active noise canceling pod architecture + 3D spatial audio system
---
7. Safety & Regulations
* Road Compliance:
* Adaptive lighting compliant with UN-ECE standards
* Dynamic braking thrusters + energy recapture
* Emergency deployment legs for full stop & parking
* Emergency Systems:
* Parachute recovery system (above 10 m)
* Dual-layer battery shielding and fire suppression foam tank
* Fail-safes:
* Triple-redundant flight control computer
* Manual override switch with landing stabilization
---
8. Software & Connectivity
* OS: AerovitaOS – Real-time autonomous vehicle operating system
* Connectivity:
* 5G / Starlink mesh compatible
* OTA software updates
* Security:
* Biometric authentication
* Encrypted flight logs + onboard diagnostics
* Remote vehicle shutdown and GPS lock
---
Here is a detailed conceptual Battery and Propulsion System Wiring Schematic for the *AEROVITA* hovercraft. This design assumes advanced electric architecture with modular safety features and high redundancy, typical for cutting-edge EV aerospace-grade platforms.
SYSTEM OVERVIEW
The system consists of:
* Battery Pack Module (BPM)
* Power Distribution Unit (PDU)
* Lift Fan Control Units (LFCUs)
* Propulsion Thrust Controllers (PTCs)
* Energy Management System (EMS)
* Cooling & Safety Systems
---
BATTERY SYSTEM ARCHITECTURE
Battery Pack Module (BPM)
* Type: Solid-state lithium-graphene
* Capacity: 180 kWh
* Voltage: 900V nominal
* Configuration: 10 modules x 18 kWh
* Positioning: Beneath floor and partially under seating area
Battery Schematic (Simplified)
[BPM] ──► [BMS] ──► [PDU] ─┬─► [Lift Fan Controllers (x4)]
├─► [Thrust Propulsion Controllers (x4)]
├─► [Supercapacitor Bank] ─► [Emergency Boost]
└─► [Vehicle Core Systems]
* BMS = Battery Management System (monitors cell voltage, temp, balance)
* PDU = Central Power Distribution Unit (fuses, relays, logic split)
---
PROPULSION SYSTEM (THRUST VECTORING)
Main Components
* Thrust Propulsion Units (TPUs):
* 4x electric vector-fan assemblies
* 55 kW each
* Rotationally adjustable via servo-driven gimbals
* Control Pathway:
* \[PDU] → \[PTC] → \[Vector Fan Drive Motors] + \[Pitch Servo Motors]
Wiring Logic Diagram (Conceptual)
[PTC1] ──► [Front-Left Vector Fan + Gimbal Servo]
[PTC2] ──► [Front-Right Vector Fan + Gimbal Servo]
[PTC3] ──► [Rear-Left Vector Fan + Gimbal Servo]
[PTC4] ──► [Rear-Right Vector Fan + Gimbal Servo]
All PTCs are controlled by:
┌────────────────────┐
│ Vehicle Flight │
│ Control System │
└────────┬───────────┘
↓
[CAN Bus or Optic Link to All PTCs & LFCUs]
---
LIFT SYSTEM ELECTRICAL FLOW
* Lift Fans: 4x downward-facing, ducted electric turbines
* Power Draw: \~20 kW per fan during hover
* Control: Individually throttled by LFCUs for balance
Lift Fan Wiring
[LFCU1] ──► [Front Lift Fan]
[LFCU2] ──► [Rear Lift Fan]
[LFCU3] ──► [Left Lift Fan]
[LFCU4] ──► [Right Lift Fan]
* Stabilized via gyro + terrain sensor fusion loop.
* Controlled in real-time to compensate for tilt/yaw/roll.
---
COOLING & SAFETY INTERLINKS
* Liquid cooling for BPM and propulsion in closed-loop
* Independent power cut relays for each PTC and LFCU
* Ground loop detection system
* Supercapacitor Bank wired in parallel with battery for:
* Sudden boost power
* Emergency thrust during primary battery dropout
---
FIREWALLS & ISOLATION FEATURES
* Dual isolation contactors (one physical, one solid-state)
* Fused links between each battery module
* Fireproof shielding between battery sections
* Instant discharge circuit (for crash or water hazard)
* Seats 4 to 6 passengers
* Is legal for road traffic
* Does not resemble a car
* Features an innovative, independent vehicle design
---
Vehicle Name: "AEROVITA"
---
Core Design Elements
1. Form Factor & Shape
* Main Structure: Elliptical pod shape (similar to a flattened blimp) with a teardrop tail. Smooth, seamless surfaces.
* Height: Lower than an SUV but taller than a sedan, allowing both road visibility and low-profile lift.
* Orientation: Symmetrical front and back (bi-directional), removing the need for "reverse" and enhancing aerodynamic aesthetics.
2. Lift & Propulsion
* Lift:
* Dual ducted fan arrays under the body with magnetic dampening skirts (not inflatable skirts like marine hovercraft).
* Controlled air pressure allows road-hovering (5–10 cm) with dynamic stability for potholes and minor elevation changes.
* Propulsion:
* Lateral vector thrust pods located at each corner — these allow silent forward, backward, and lateral movement.
* Electrically driven turbine fans with adjustable pitch blades for thrust and braking.
3. Road-Legal Dynamics
* Ground Effect Sensors to maintain safe hover height and stability.
* Digital Lighting Strips around the body: Adaptive headlights, brake lights, and turn indicators seamlessly integrated.
* Retractable Skid Pods (like legs of a lunar lander) allow static parking/stopping on traditional roads.
* AI Road Compliance System: Ensures dynamic lane-keeping, speed adaptation, and hazard recognition.
---
Interior & Seating
* Seating Layout:
* 2+2+2 or 3+3 lounge configuration with rotating bucket seats for social/interpersonal interaction.
* No steering wheel — piloted via joystick, voice commands, or autopilot.
* Windows & Visibility:
* 360° curved panoramic electrochromic canopy.
* Roof is semi-transparent and solar-coated.
* Materials: High-strength carbon-fiber exoshell with graphene battery array embedded under floor.
---
Power System
* Battery Type: Solid-state modular lithium-graphene cells (600–800 km range).
* Charging: Wireless inductive + solar panel augmentation on upper surfaces.
* Emergency Reserve: Capacitor burst cells for rapid power in obstacle-avoidance or lift failures.
---
Tech & Features
* Fully Autonomous Navigation (L5) with manual override.
* LiDAR + Visual Sensor Dome on top, akin to a halo.
* Modular HUD projected on inner canopy.
* Environmental Adaptation Mode: Adjust hover height for rough terrain or urban streets.
---
Stylistic Highlights
* Inspiration: A mix of retro-futurism, nature (manta ray form), and science-fiction transport pods.
* Exterior Finish: Smooth ceramic-metallic skin with customizable lighting and digital surface patterns.
* Wheels: None visible — levitation only. Skid legs remain hidden until needed.
---
Optional Variants
* "Urban Ghost": Matte black stealth edition with noise-canceling field.
* "Aurora Halo": Iridescent skin that changes color dynamically based on speed and sunlight.
* "SkyRunner": Off-road capable version with slightly higher lift range and terrain mapping.
---
AEROVITA Hovercraft – Technical Specifications
1. Chassis & Body
* Body Shape: Monocoque teardrop fuselage with aerodynamic bottom curvature
* Length: 4.5 m
* Width: 2.3 m
* Height: 1.6 m
* Weight (Unladen): Approx. 1,800 kg
* Material Composition:
* Outer shell: Carbon-fiber composite with nano-ceramic coating
* Inner structure: Titanium-reinforced graphene honeycomb framework
---
2. Lift System (Hover Mechanism)
* Hover Height: Adjustable from 5 cm to 25 cm (road mode: 7–10 cm)
* Technology:
* 4x ducted electric lift fans (dual-layer, counter-rotating)
* Electromagnetic stabilization skirt ring
* Power Source: Direct-fed from propulsion battery; supercapacitor boost module
* Stability System:
* 360° IMU array
* Terrain-adaptive feedback via underbody LiDAR
* AI-assisted dampening control to counteract pitch and roll
---
3. Powertrain
* Battery Pack:
* 180 kWh solid-state lithium-graphene pack
* Range: 600–800 km (road hover)
* Charging Options:
* 350 kW fast charge port (20–80% in 18 minutes)
* Wireless inductive charging pad compatible
* Solar micro-tile surface integration (roof + upper rear)
* Cooling: Liquid cooling with phase-change radiator backing plate
---
4. Propulsion & Maneuvering
* Main Propulsion:
* 4x vector-thrust pods (one per corner)
* Electrically driven variable-pitch fanjets with silent blade geometry
* Combined thrust: 220 kW
* Max Speed:
* Urban limit: 120 km/h
* Off-road/hoverfield mode: 60 km/h
* Maneuvering:
* Omni-directional movement
* Lateral drift and rotation capabilities via asymmetric thrust
---
5. Navigation & Control
* Autonomy: SAE Level 5 (full self-driving)
* Control Methods:
* Joystick + touchscreen interface
* Voice + gesture input
* Manual override using holographic HUD controls
* Sensors:
* LiDAR dome (360°)
* Front and rear optical arrays
* 8-point ultrasonic proximity sensors
* Redundant inertial nav + GPS fusion
---
6. Interior
* Passenger Capacity: 4–6 (2x3 or 3x3 modular layout)
* Seats: Rotating zero-gravity style with memory gel contouring
* Cabin Features:
* Ambient lighting with reactive mood modes
* Augmented reality canopy HUD
* Smart glass (electrochromic)
* Air-filtration & climate with adaptive zoning
* Sound: Active noise canceling pod architecture + 3D spatial audio system
---
7. Safety & Regulations
* Road Compliance:
* Adaptive lighting compliant with UN-ECE standards
* Dynamic braking thrusters + energy recapture
* Emergency deployment legs for full stop & parking
* Emergency Systems:
* Parachute recovery system (above 10 m)
* Dual-layer battery shielding and fire suppression foam tank
* Fail-safes:
* Triple-redundant flight control computer
* Manual override switch with landing stabilization
---
8. Software & Connectivity
* OS: AerovitaOS – Real-time autonomous vehicle operating system
* Connectivity:
* 5G / Starlink mesh compatible
* OTA software updates
* Security:
* Biometric authentication
* Encrypted flight logs + onboard diagnostics
* Remote vehicle shutdown and GPS lock
---
Here is a detailed conceptual Battery and Propulsion System Wiring Schematic for the *AEROVITA* hovercraft. This design assumes advanced electric architecture with modular safety features and high redundancy, typical for cutting-edge EV aerospace-grade platforms.
SYSTEM OVERVIEW
The system consists of:
* Battery Pack Module (BPM)
* Power Distribution Unit (PDU)
* Lift Fan Control Units (LFCUs)
* Propulsion Thrust Controllers (PTCs)
* Energy Management System (EMS)
* Cooling & Safety Systems
---
BATTERY SYSTEM ARCHITECTURE
Battery Pack Module (BPM)
* Type: Solid-state lithium-graphene
* Capacity: 180 kWh
* Voltage: 900V nominal
* Configuration: 10 modules x 18 kWh
* Positioning: Beneath floor and partially under seating area
Battery Schematic (Simplified)
[BPM] ──► [BMS] ──► [PDU] ─┬─► [Lift Fan Controllers (x4)]
├─► [Thrust Propulsion Controllers (x4)]
├─► [Supercapacitor Bank] ─► [Emergency Boost]
└─► [Vehicle Core Systems]
* BMS = Battery Management System (monitors cell voltage, temp, balance)
* PDU = Central Power Distribution Unit (fuses, relays, logic split)
---
PROPULSION SYSTEM (THRUST VECTORING)
Main Components
* Thrust Propulsion Units (TPUs):
* 4x electric vector-fan assemblies
* 55 kW each
* Rotationally adjustable via servo-driven gimbals
* Control Pathway:
* \[PDU] → \[PTC] → \[Vector Fan Drive Motors] + \[Pitch Servo Motors]
Wiring Logic Diagram (Conceptual)
[PTC1] ──► [Front-Left Vector Fan + Gimbal Servo]
[PTC2] ──► [Front-Right Vector Fan + Gimbal Servo]
[PTC3] ──► [Rear-Left Vector Fan + Gimbal Servo]
[PTC4] ──► [Rear-Right Vector Fan + Gimbal Servo]
All PTCs are controlled by:
┌────────────────────┐
│ Vehicle Flight │
│ Control System │
└────────┬───────────┘
↓
[CAN Bus or Optic Link to All PTCs & LFCUs]
---
LIFT SYSTEM ELECTRICAL FLOW
* Lift Fans: 4x downward-facing, ducted electric turbines
* Power Draw: \~20 kW per fan during hover
* Control: Individually throttled by LFCUs for balance
Lift Fan Wiring
[LFCU1] ──► [Front Lift Fan]
[LFCU2] ──► [Rear Lift Fan]
[LFCU3] ──► [Left Lift Fan]
[LFCU4] ──► [Right Lift Fan]
* Stabilized via gyro + terrain sensor fusion loop.
* Controlled in real-time to compensate for tilt/yaw/roll.
---
COOLING & SAFETY INTERLINKS
* Liquid cooling for BPM and propulsion in closed-loop
* Independent power cut relays for each PTC and LFCU
* Ground loop detection system
* Supercapacitor Bank wired in parallel with battery for:
* Sudden boost power
* Emergency thrust during primary battery dropout
---
FIREWALLS & ISOLATION FEATURES
* Dual isolation contactors (one physical, one solid-state)
* Fused links between each battery module
* Fireproof shielding between battery sections
* Instant discharge circuit (for crash or water hazard)

Figure 1.
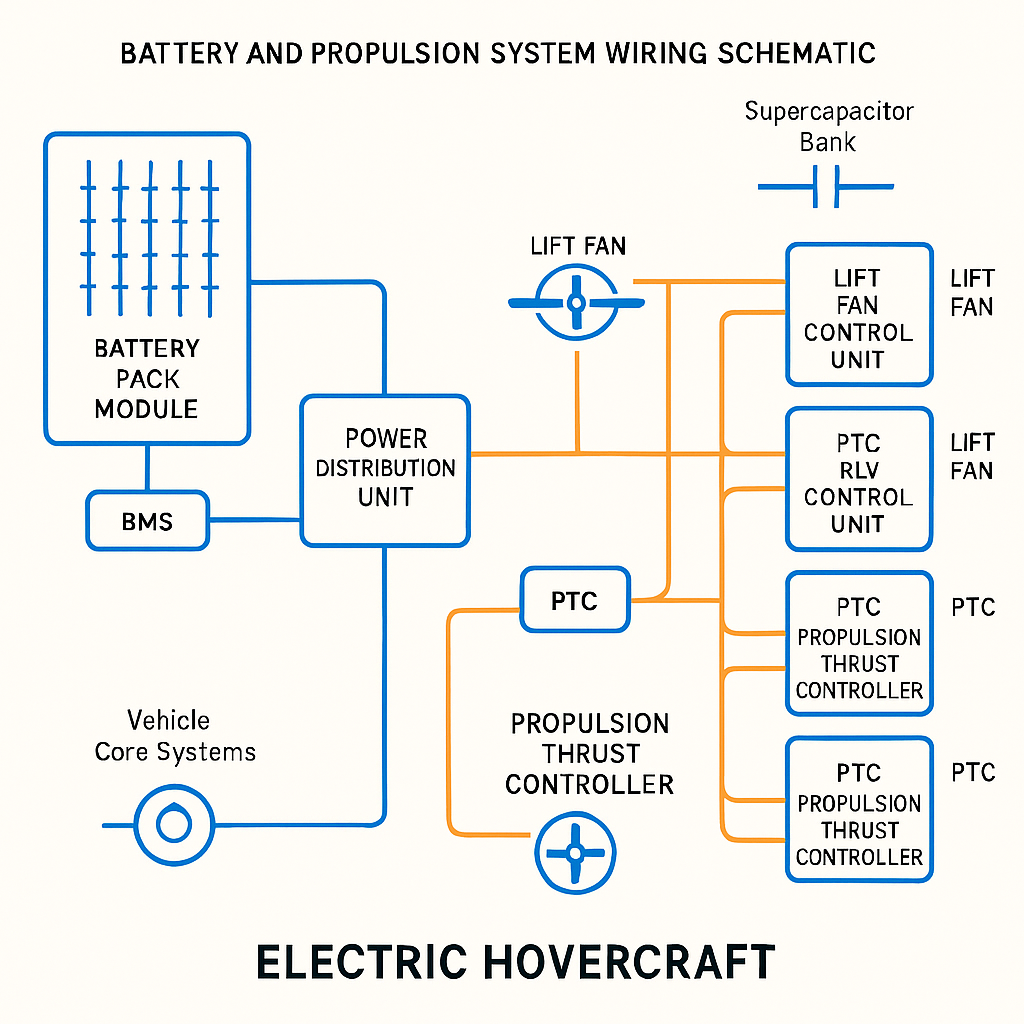
Figure 2.
commentComments
Click here for more information.
No Comments.
Cookies Notice
We use cookies to ensure that we give you the best experience on our website. By continuing to visit this site you agree to our use of cookies.
Click here for more information about the use of cookies on our website.
Click here for more information about the use of cookies on our website.